
การวางแผนการบินและการทำแผนที่ด้วยอากาศยานไร้คนขับ
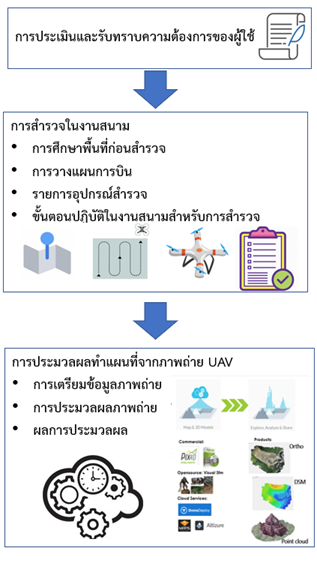
การสำรวจด้วยอากาศยานไร้คนขับประกอบด้วยการทำงานส่วนใหญ่ ๆ 3 ส่วน ได้แก่ งานประเมินความต้องการของผู้ใช้ งานสำรวจในภาคสนาม และงานประมวลผล ซึ่งต้องใช้ความเข้าใจในการปฏิบัติงานเพื่อให้ได้ข้อมูลแผนที่และค่าพิกัดเชิงตำแหน่งที่ถูกต้องตามหลักการ ทั้งนี้งานภาคสนามของการสำรวจด้วยอากาศยานไร้คนขับได้รวมงานวางแผนการบินถ่ายภาพทางอากาศ ส่วนงานประมวลผล ได้แก่ การประมวลผลภาพถ่าย, การตรวจสอบคุณภาพผลลัพธ์ และการส่งออกข้อมูลเพื่อการนำไปใช้ในงานด้านต่างๆ
เนื่องจากขอบเขตของพื้นที่แปลงใหญ่ที่ทางโครงการวิจัยกำหนดไว้มีส่วนซ้อนทับกับพื้นที่ห้ามบินในรัศมี 5 กม. จากสนามบินสุราษฎร์ธานี (AERO DOME) ดังนั้นก่อนทำการสำรวจต้องมีกระบวนการขออนุญาตไปยัง การท่าอากาศยานสุราษฎร์ธานี โดยต้องกำหนดรายละเอียดในการขออนุญาตรายละเอียดดังต่อไปนี้ เพื่อขอใบอนุญาตการปล่อยอากาศยาน(NOTAM)
- เอกสารเหตุผลการขอขึ้นบินสำรวจโดยอากาศยานไร้คนขับ
- ขอบเขตพื้นที่ที่จะบินและเขตพื้นที่ซ้อนทับ
- ตำแหน่งอ้างอิงจุดปล่อยอากาศยาน : โรงเรียนวัดเขาศรีวิชัย ต.ศรีวิชัย อ.พุนพิน จ.สุราษฎร์ธานี
- พิพัดทางภูมิศาสตร์ของจุดปล่อยอากาศยาน 9° 9’63″N 99°13’28.11″E
- ทิศทางที่จะทำปล่อยอากาศยาน: 60N
- ระยะทางจากพิกัดปล่อยอากาศยานไปยังท่าอากาศยานสุราษฎร์ธานี49 Nautical Miles
- เพดานบินสูงสุด 700 ฟุต
ในขั้นตอนการดำเนินการในการสำรวจก่อนทำการขึ้นบินในช่วงเวลาเช้า ผู้ควบคุมอากาศยานต้องติดต่อยืนยันก่อนทำการปล่อยอากาศยานโดยจะต้องประสานงานกับท่าอากาศยานสุราษฎร์ธานี และหอบังคับการบินตามลำดับก่อน จากนั้นเมื่อถึงเวลาดำเนินการสำรวจตามเวลาที่ขอใบอนุญาตการปล่อยอากาศยาน (NOTAM) ก่อนทำการปล่อยอากาศยาน จะต้องแจ้งที่หอบังคับการบินอีกครั้ง เพื่อยืนยันรายละเอียดการปล่อยอากาศยานตามที่ขออนุญาตตามตำแหน่งพิกัดปล่อยอากาศยาน เพดานบิน ทิศทางการปล่อย และระยะจากจุดปล่อยอากาศยานจนถึงสนามบิน หลังจากได้รับแจ้งสัญญาญอนุมัติการปล่อยอากาศยาน ผู้ควบคุมอากาศยานสามารถปล่อยอากาศยานได้ และเมื่อมีการลงจอดในแต่ละชุดการบินย่อยของพื้นที่จะต้องแจ้งที่หอบังคับการบินทุกครั้ง สุดท้ายเมื่อจบภาระกิจการบินในพื้นที่จะต้องแจ้งหอบังคับการบิน และท่าอากาศยานสุราษฎร์ธานี เพื่อขอจบภารกิจในการปล่อยอากาศยาน
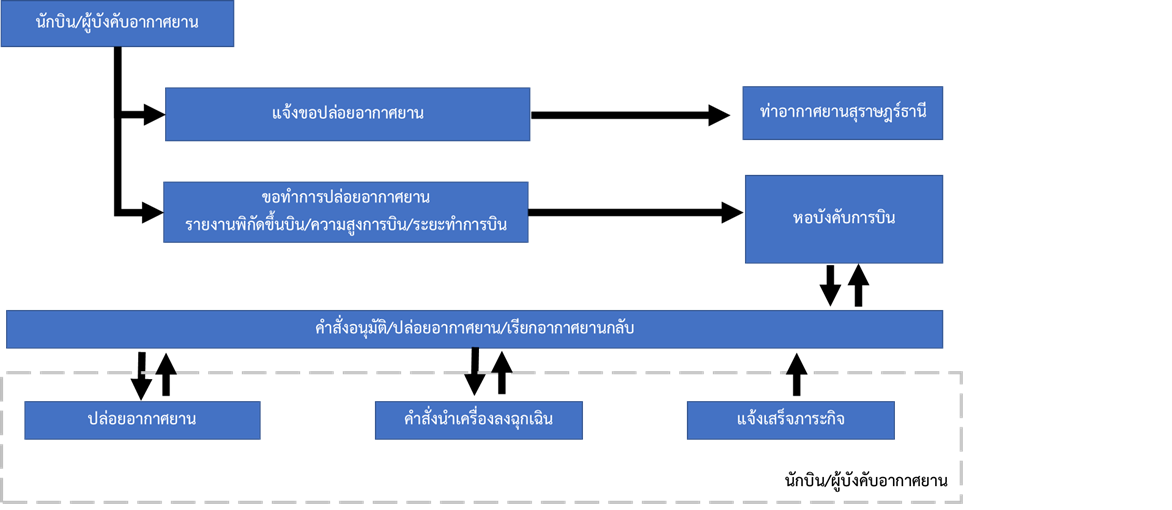
ภาพแสดงกระบวนการขออนุญาตก่อนทำการสำรวจในพื้นที่ห้ามบิน
หลักการประมวลผลโดยใช้โปรแกรม Agisoft Metashape มีขั้นตอนการประมวลผลดังต่อไปนี้
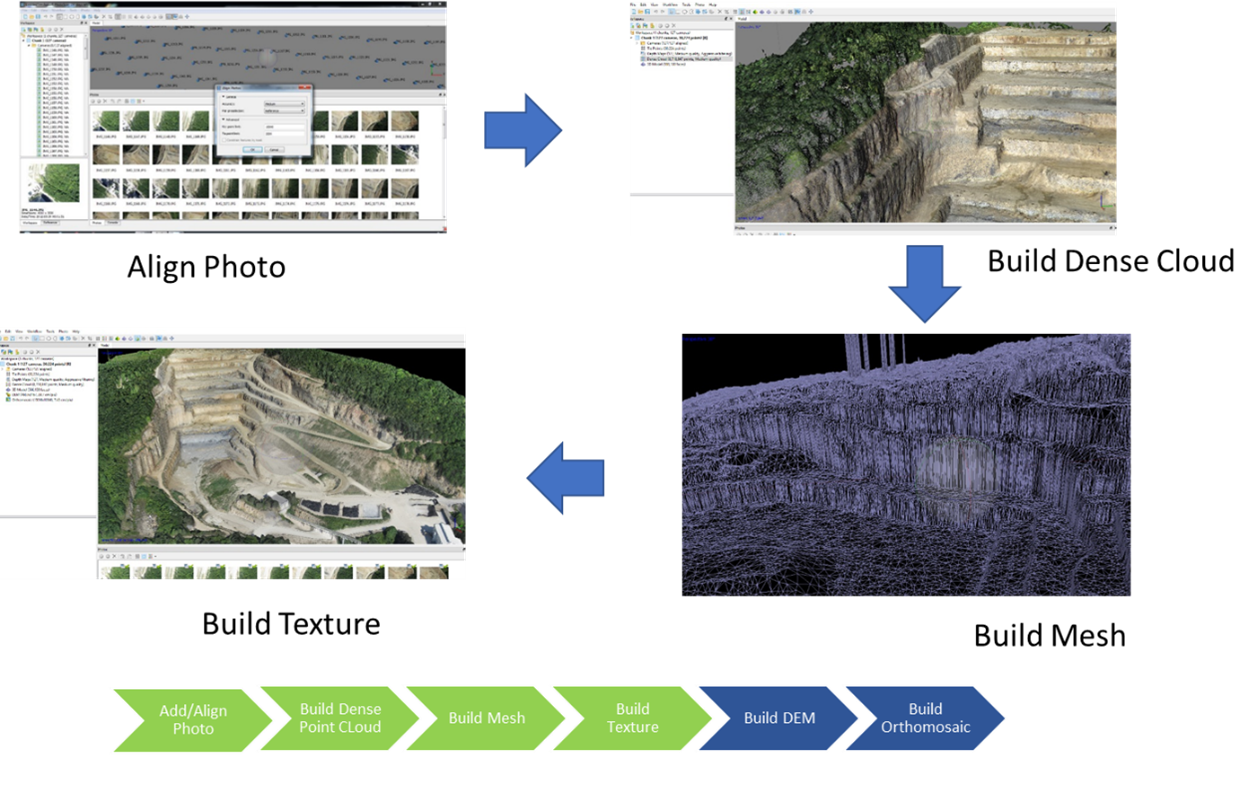
- Align Photo เป็นกระบวนการนำภาพทั้งหมดมาจัดเรียงตามแนวบิน เพื่อคำนวณหาจุดของภาพที่เหมือนกัน และเพื่อใช้สร้างโมเดล
- Build Dense Cloud เป็นกระบวนการสร้าง Dense Cloud ให้กับตัว Model ที่ถูกสร้างขึ้น จากการ Matching ตำแหนน่าจุดอ้างอิงเดียวกันในแน่จละภาพให้เป็น 1 จุด Single Point (รวมกันหลายๆจุดเรียกว่า Dens Cloud)
- Build Mesh เป็นกระบวนการสร้างพื้นผิวสามมิติโดยใช้หลักการสร้างจากการเชื่อมระหว่างจุดอ้างอิงของ Dense Cloud โดยเชื่อมจุดเป็นแบบโครงข่ายสามเหลี่ยม
- Build Texture เป็นกระบวนการนําพื้นสีของภาพ มาใส่ในโมเดลของพื้นผิวสามมิติ (Mesh) เพื่อที่จะทำให้โมเดลมีความละเอียดของภาพเป็นไปตามสภาพพื้นที่จริง.
- Build DEM เป็นกระบวนการสร้างแผนที่ชั้นความสูงชองข้อมูล โดยสร้างมากจากข้อมูลโมเดล
- Build Orthomosiac เป็นกระบวนการสร้างแผนที่ภาพถ่ายออร์โธสี
ขั้นตอนการปฏิบัติงานในสนามสำหรับงานสำรวจทำแผนที่โดยอากาศยานไร้คนขับ โดยจะใช้อากาศยานแบบปีกหมุน(Multi-rotor) ยี่ห้อ DJI เป็นหลัก ซึ่งในบทนี้จะกล่าวถึงกระบวนการ ทำงาน ในขั้นตอนต่างๆของการออกภาพสนามเพื่อทำการสำรวจและบินถ่ายภาพในพื้นที่
การศึกษาพื้นที่ก่อนการสำรวจ
ลำดับแรกของการสำรวจเพื่อทำแผนที่ สิ่งแรกที่จะต้องทราบคือ วัตถุประสงค์ของแผนที่ที่จะใช้เพื่อที่จะนำมาประเมินค่าความละเอียดของแผนที่นั่นเอง ยกตัวอย่างเช่น ต้องการสำรวจจำนวนปาล์มน้ำมัน และสามารถกำหนดขอบเขตของต้นได้ หรือต้องการสำรวจเพื่อที่จะทำแผนที่พื้นที่การเกษตรกรรม ซึ่งข้อมูลเหล่านี้จะนำไปตัดสินใจในการวางแผนการบินเพี่อกำหนด ความสูงการบิน จำนวนแนวบิน ส่วนซ้อนและส่วนเกยกันของภาพ
สำรวจขอบเขตและพื้นที่ศึกษา
เมื่อได้พื้นที่เป้าหมายสำหรับการสำรวจ จากนั้นลองวัดขนาดพื้นที่โดยใช้Google Maps ดูว่าพื้นที่ศึกษามีขนาดเท่าไร แต่เนื้องจากบน google map การวัดพื้นที่เป็นหน่วยตารางเมตร ดังนั้นถ้าต้องการหน่วยเป็นที่เป็นไร่ให้คูณด้วย 0.000625 หรือต้องการ Ha ให้คูณ ด้วย 0.0001 ยกตัวอย่างเช่นวัดขนาดพื้นที่ได้วัดได้บน google maps คือ 115,545.30 ตร.ม.
- แปลงเป็น HA = 115,30 *0.0001 = 11.554 HA
- แปลงเป็นไร่ = 115,30 *0.000625 = 72.215 ไร่
เพื่อที่จะนำมาประเมินจำนวนแบตเตอรี่และการวางแผนการบินได้อย่างมีประสิทธิภาพเราจึงจะต้องทราบข้อมูลเบื้องต้นของพื้นที่และความสามารถในการทำการบินของอากาศยานไร้คนขับที่จะใช้ในการสำรวจ
สำรวจพื้นที่เป้าหมายและสิ่งกีดขวาง
เพื่อที่จะให้การสำรวจดำเนินไปอย่างมีประสิทธิภาพและหลีกเลี่ยงความเสียหายที่จะเกิดจากอุบติเหตุ เราจึงต้องทำการสำรวจพื้นที่ก่อนการบินในหน้างานจริงอีกครั้ง ซึ่งสิ่งที่ต้องระวังในพื้นที่ที่ทำการสำรวจมีดังต่อไปนี้
- เสาส่งโทรศัพท์, เสาวิทยุกระจายเสียง, สถานีทวนสัญญาณ และสายอากาศแรงสูง นั้นมีผลต่อการบินในสองรูปแบบคือ
- ความเข้มของสัญาณภาพของอากาศยานจะถูกรบกวนเนื่องจากสถานีดังกล่าวนั้นจะมีความเข้มสัญญาณมากกว่าอากาศยานไร้คนขับมาก
- อันตรายทางด้านความสูง สถานทวนสัญญาณต่างๆ ส่วนใหญ่จะมีความสูงตั้งแต่ 60-110 เมตร ดังนั้นฝนการวางแผนการบินจึงควรหลีกเลี่ยงเส้นทางการบิน
- สายส่งไฟฟ้าแรงสูงนั้น จะสามารถสร้างสนามแม่เหล็กไฟฟ้าขนาดเข้มข้นได้ ดังนั้นการบินเข้าใกล้กับสายส่งไฟฟ้าแรงสูงจะมีโอกาศที่เข็มทิศของอากาศยานไร้คนขับทำงานผิดปกติได้
- พื้นที่ทำการขึ้นลงมีแนวท่อ ฝาท่อเหล็ก การขึ้นลงทางดิ่งนั้น ก่อนการขึ้นลงอากาศยานไรคนขับจะทำการปรับเทียบเข็มทิศ การขึ้นลงบนฝาท่อ หรือสิ่งปลูกสร้างที่เป็นเหล็กนั้นจะทำการรบกวนสัญญาณและไม่สามารถระบุทิศของแม่เหล็กโลกได้
- การเปลี่ยนแปลงความสูงของพื้นที่ เนื่องจากอากาศยานไร้คนขับของ DJI ส่วนใหญ่จะใช้การอ้างอิงความสูงจากจุดที่ทำการขึ้นบิน และทำการบินที่ความสูงเท่ากันตลอดการบิน
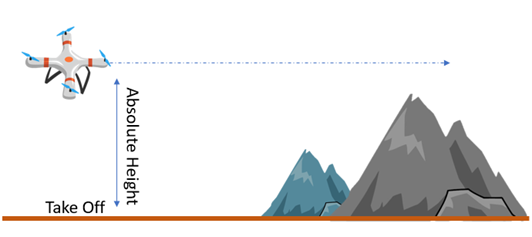
ภาพแสดงลักษณะการบินแบบความสูงสัมบูรณ์ (Absolute Height)
ดังนั้น หากพื้นที่ที่ทำการบินมีการเปลี่ยนแปลงพื้นที่อย่างฉับพลันเมื่อเทียบกับจุดที่ทำการขึ้นลง จะทำให้มีโอกาศที่อากาศยานไร้คนขับ จะไปชนเข้ากับภูเขาหรือสิ่งกีดขวางต่างๆได้ ดังนั้นก่อนการขึ้นบิน จึงต้องทำการสำรวจพื้นที่และกำหนดความสูงปลอดภัยและแนวเขา เพื่อที่จะวางแผนการบินได้อย่างมีประสิทธิภาพ
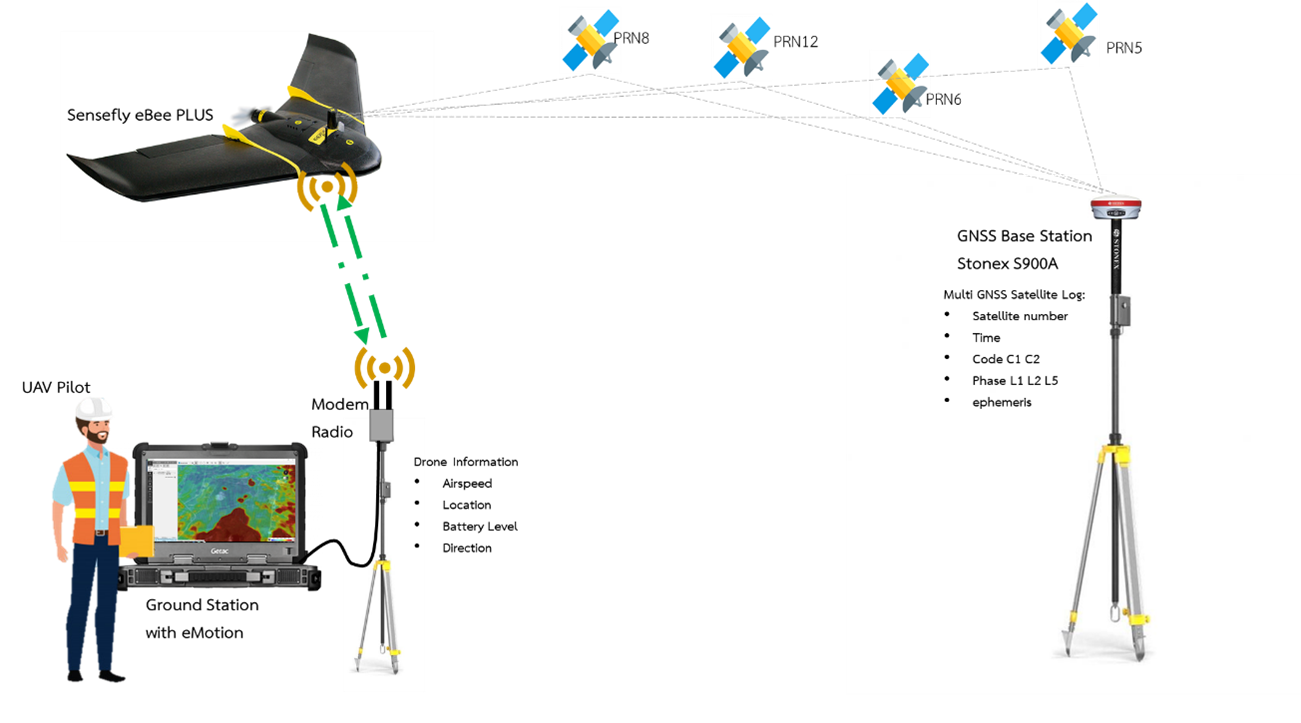
การบินถ่ายภาพทางอากาศสำหรับพื้นที่แปลงใหญ่ ทางโครงการวิจัยเลือกใช้อากาศยานแบบปีกตรึง (fixed wing) เนื่องจากเป็นอากาศยานไร้คนขับที่ออกแบบมาเพื่อการบินสำรวจพื้นที่ขนาดใหญ่ และเพื่อการลดเวลาในการดำเนินงานในการสำรวจภาคสนาม โดยใช้อากาศยานไร้คนขับแบบปีกตรึงยี่ห้อ Sensefly รุ่น eBee Plus ร่วมกับกล้องถ่ายภาพสีจริง (RGB) ซึ่งมีความละเอียดภาพขนาด 20 Megapixels ร่วมกับสถานีรับข้อมูลดาวเทียม และเครื่องรับสัญญาณดาวเทียม ยี่ห้อ Stonex รุ่น S900A ซึ่งเป็นเครื่องรับสัญญาณดาวเทียมแบบหลายความถี่ เพื่อประมวลผลแบบ Post Processing Kinematic (PPK) เพื่อให้ค่าพิกัดข้อมูลทางราบและทางดิ่งของภาพถ่ายทางอากาศมีความถูกต้องสูงขึ้น
การบินสำรวจในพื้นที่แปลงใหญ่โดยอากาศยานไร้คนขับแบบปีกตรึง ก่อนเริ่มการทำการสำรวจผู้ควบคุมอากาศยานจะทำการติดตั้งและสถานีรับข้อมูลดาวเทียม (GNSS Base Station) ก่อน โดยจะทำการเก็บข้อมูลตลอดทั้งวัน ตั้งแต่ก่อนทำการบิน จนถึงเสร็จสิ้นภารกิจ โดยข้อมูลที่ได้จะอยู่ในรูปแบบ Rinex FORMAT จากนั้นผู้บังคับอากาศยานไร้คนขับ จะทำการติดตั้งสถานีภาคพื้น(Ground Station) ซึ่งประกอบด้วยคอมพิวเตอร์โน้ตบุ๊คที่มีการติดตั้งโปรแกรม eMotion และเชื่อมต่อกับเสาโมเดมภาควิทยุในย่าน 2.4 Ghz
ภาพ : ขั้นตอนการบินสำรวจ
ในลำดับต่อมาคือการกำหนดจุดปล่อยและจุดลงจอดของอากาศยาน โดยเลือกพื้นที่โล่ง ไม่มีสิ่งกีดขวางโดยรอบ และมีสิ่งปกคลุมที่ไม่เป็นอันตรายต่ออากาศยานเช่น กรวด หินหยาบ เมื่อทำการกำหนดพื้นที่ จุดขึ้นลงอากาศยานเรียบร้อยแล้ว ก่อนปล่อยอากาศยานจะต้องทำการจำลองการบิน(Simulation) เพื่อตรวจสอบพื้นที่ ความสูงของภูเขา ความเร็วลม ตำแหน่งสัญญาณและระยะสัญญาณโดยรอบ
เมื่อผู้ควบคุมพร้อมทำการปล่อยอากาศยาน ถ้าอยู่ในพื้นที่ที่ต้องขออนุญาตก่อนบิน เช่นพื้นที่ใกล้สนามบิน 5 กิโลเมตร (AERO DOME) จะต้องโทรประสานงานและแจ้งการท่าอากาศยานและหอบังคับการบินก่อนนำขึ้นเครื่องทุกครั้ง จากนั้นเมื่อทำการปล่อยอากาศยานเป็นที่เรียบร้อย ผู้ควบคุมการบินจะคอยติดตาม และตรวจสอบระหว่างการบินว่าเป็นไปตามแผนการบินที่กำหนดตามที่ออกแบบหรือไม่

ภาพ: การปล่อยอากาศยานไร้คนขับเพื่อการสำรวจทำแผนที่แปลงใหญ่
ในกรณีที่อาจเกิดสถานการณ์ฉุกเฉิน เช่น ฝนตก มีสถานะแบตเตอรี่ต่ำผิดปกติ ความเร็วลมเกินแรงต้านของอากาศยาน หรือมีสิ่งผิดปกติอื่นๆ ทางผู้ควบคุมอากาศยานจะทำการติดต่อและบังคับอากาศยานให้รีบกลับมาและลงจอดเพื่อตรวจสอบโดยทันที
ขั้นตอนปฏิบัติก่อนการบิน
ในขั้นตอบปฏิบัติก่อนการขึ้นบินจะทำการตรวจสอบรายการต่างๆดังต่อไปนี้
ก่อนทำการบิน
- แจ้งเจ้าของพื้นที่รับทราบถึงจุดประสงค์ก่อนขึ้นบิน
- SD Card มีพื้นที่เพียงพอ หรือไม่มีข้อมูลเก่าค้าง
- ตรวจสอบปริมาณแบตเตอรี่ และลักษณะภายนอก ต้องไม่มีการแตก บวม
- ตรวจสอบใบพัดว่าไม่มีการแตก บิ่น หรือ หัก ร้าว
- Firmware ของโปรแกรมควบคุมได้รับการอัพเดทเป็นเวอร์ชั่นล่าสุด
- สภาวะอากาศปลอดโปร่ง ไม่มีฝน หรือเมฆหนาทึบ
- ตรวจสอบ และหลีกเลี่ยงการรบกวนจากคลื่นแม่เหล็กไฟฟ้า เช่น พื้นผิวที่เป็นเหล็ก, เสาส่งไฟฟ้าแรงสูง,และเสาส่งโทรคมนาคม
- ตรวจสอบพื้นที่ทำการบินโดยรอบที่จะเป็นสิ่งกีดขว้างในการทำการบิน เช่น ต้นไม้, เสาไฟฟ้า, อาคารสิ่งปลูกสร้าง และภูเขา
- ตรวจสอบสภาวะแวดล้อมที่อาจจะเกิดอันตรายได้ เช่น สนามเด็กเล่น สัตว์เลี้ยง และประชาชน
รายการตรวจสอบอากาศยาน
- ตรวจสอบหน้ากล้อง และอุปกรณ์ล็อคกล้อง
- ตรวจสอบการใส่อุปกรณ์บันทึกข้อมูล Micro SD Card
- ตรวจสอบความสะอาดของเลนส์ หรือ Filter
- ตรวจสอบการใส่ใบพัดถูกต้องการทิศทางและแน่นหนา
- ตรวจสอบการใส่แบตเตอรี่ว่า แบตเตอรี่เต็มประจุ และการใส่แบตเตอรี่เข้ากับอากาศยานได้เข้าล็อคพอดี
- ไฟสถานีอากาศยานไฟสีแดงอยู่ด้านหน้า สีเขียวด้านหลัง (หันไปตามทิศที่จะเปิดทำการบิน)
- อากาศยานต้องวางอยู่บนพื้นเรียบไม่มีสิ่งกีดขวางหน้ากล้อง
- ตรวจสอบสถานะแบตเตอรี่ผ่านโปแกรม
- ตรวจสอบประมาณเวลาที่จะใช้กับแบตเตอรี่
- นักบินพร้อมบิน
รายการตรวจสอบอุปกรณ์ควบคุมอากาศยาน
- ตรวจสอบอุปกรณ์ควบคุมอากาศยานได้เชี่อมต่อกับโทรศัพท์หรือเทปเล็ต
- ตรวจสอบการใส่อุปกรณ์บังแสงแดด
- ตรวจสอบการติดตั้งโทรศัพท์หรือเทปเล็ตกับขาตั้งกล้อง
- ตรวจสอบมุมของเสาสัญญาณอุปกรณ์ควบคุมอากาศยาน
- ตรวจสอบโหมดการใช้งานและการควบคุม
- ตรวจสอบสถานะแบตเตอรี่ของอุปกรณ์ควบคุมอากาศยาน
- เปิดอุปกรณ์อุปกรณ์ควบคุมอากาศยาน
- เปิดโทรศัพท์หรือเทปเล็ต และตั้งค่าความสว่างของจอไปให้เหมาะสม
- เปิดโปรแกรมควบคุมและตรวจสอบสถานะโดยรวม (DJI GO)
- รายการตรวจสอบโปรแกรม DJI GO / DJI GO
- ตรวจสอบการล็อคค่าความสูงการบิน
- ตรวจสอบการตั้งค่ากลับบ้านอัตโนมัติและความสูงของการ Return-To-Home
- ตรวจสอบสัญญาณภาพ สัญญาณการเชื่อมต่ออุปกรณ์ควบคุมอากาศยาน
- ตรวจสอบสถานะและการสอบเทียบ IMU และ COMPASS
- ตรวจสอบตำแหน่งค่าพิกัดสัญญาณดาวเทียมมากกว่า 12 ดวง
- ตรวจสอบว่าพื้นที่ทำการบินและตำแหน่งที่ขึ้นบินถูกต้อง
- ตรวจสอบค่ากล้องต่างๆ เช่น ISO, FOCUS, Image Mode (D-Log)
รายการตรวจสอบก่อนทำการบินจริง
- ตรวจสอบพื้นที่ขึ้นบินและการลงจอดเหมาะสมหรือไม่
- ทดสอบเดินรอบมอเตอร์
- ทดสอบการขึ้นบินและลอยตัวนิ่ง
- ทดสอบอุปกรณ์ควบคุมอากาศยานตอบสนองตามการควบคุม